Rapidly Exploring Random Tree with Multimap Merge
Date: Fall 2018 | Category: Personal Project | Affiliation: Colorado State University
Simulate Real time Rapidly Exploring Random Tree (RRT) using ROS and Gazebo Simulator for 3 or more robots.
Dependencies:




Media
Frontier Based RRT Exploration for Single Swarm Robot
Frontier Based RRT Exploration for Multiple Swarm Robots
Overview
A multi-robot map exploration algorithm for mobile robots based on the Rapidly-Exploring Random Tree (RRT) algorithm. It uses occupancy grids as a map representation. It uses the following ROS Packages for simulation and implementation:
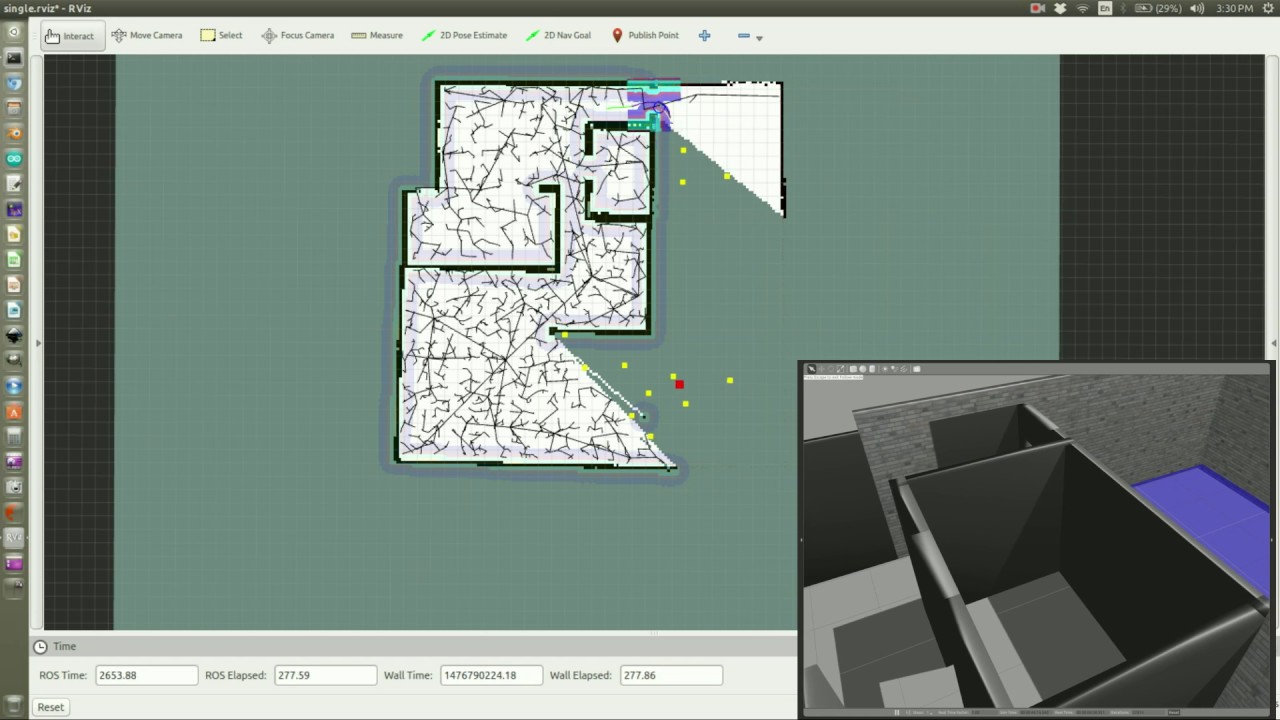
Figure 1. RRT as seen in Rviz and Simulation in Gazebo