Task Level Controller for 6-Axis Robots
Date: Fall 2017 | Category: MECH 564 | Affiliation: Colorado State University
Evaluate the task level robot control method for PUMA 560 robot arm by computer simulations.
Dependencies:




Overview
The aim of this project was to develop a non-linear controller and decouple the robot dynamics model in the task space. This was my final project for Dr. Jianguo Zhao's class MECH 564 - Fundamentals of Robot Mechanics and Control. It involved modelling and simulating a task level controller for PUMA 560 6-axis robot in SIMULINK. The code was developed in MATLAB based on the DH parameters as shown in Table 1. below. Few important details of the robot are:
- 6 Axis arm with 3 axis making up a spherical wrist
- Maximum reach 878mm from center axis to center of wrist
- Software selectable payloads from 4 kg to 2.5 kg
- Arm wright: 83 kg (approximate)
- Repeatability ±0.1mm
- 2.5 kg max velocity: 500mm/sec straight line moves
- 4.0 kg max velocity: 470mm/sec straight line moves
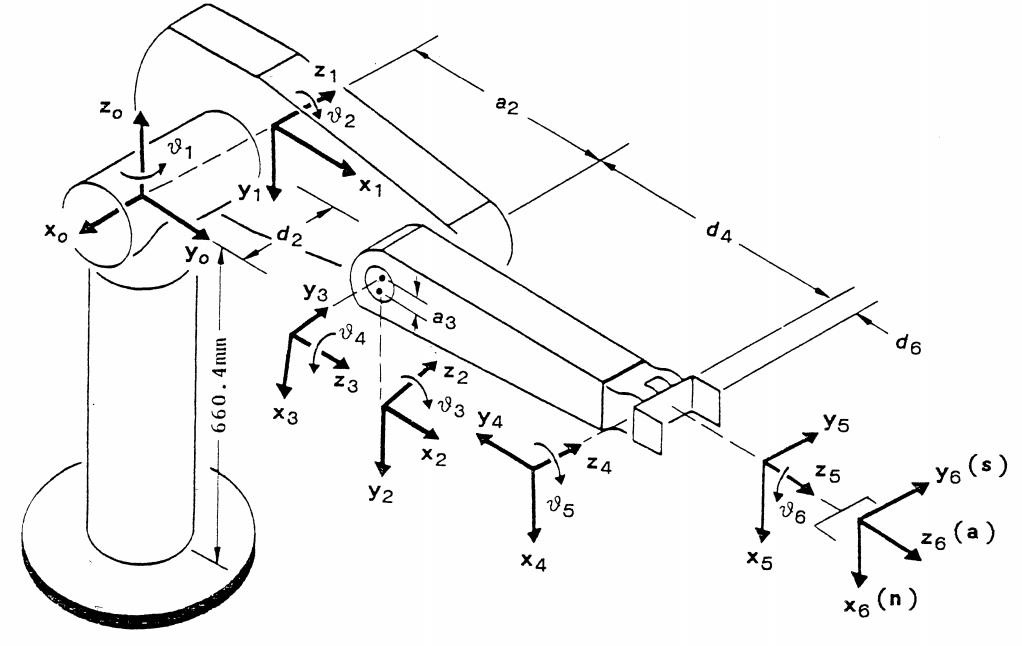
Figure 1. PUMA 560 Robot
The link parameters of the PUMA 560 robot are as follows:
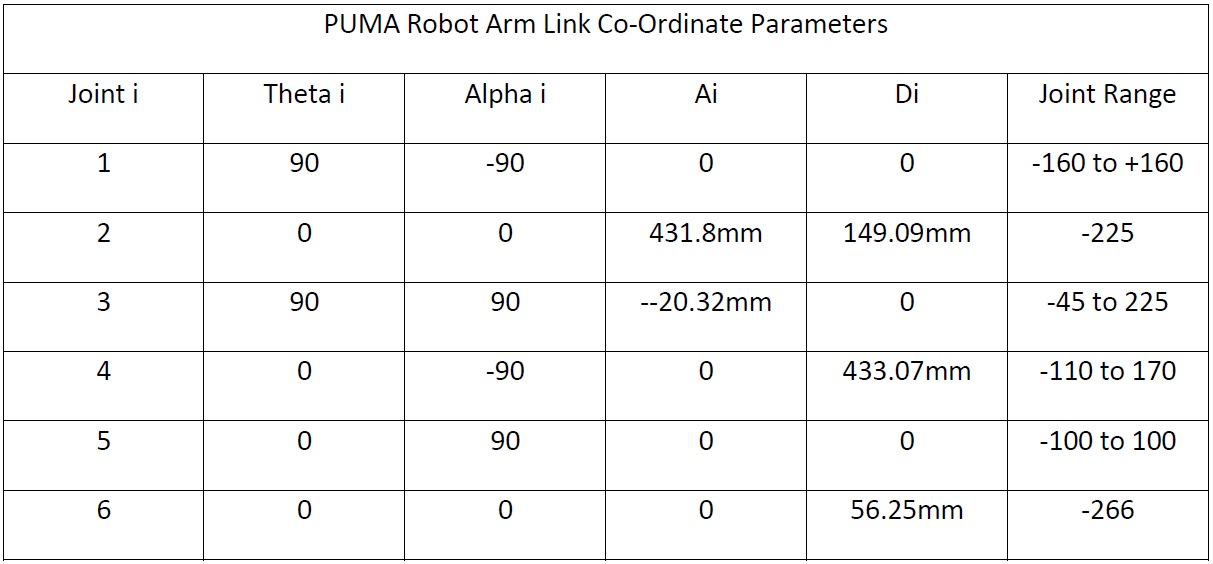
Table 1. DH Parameters of PUMA 560 Robot
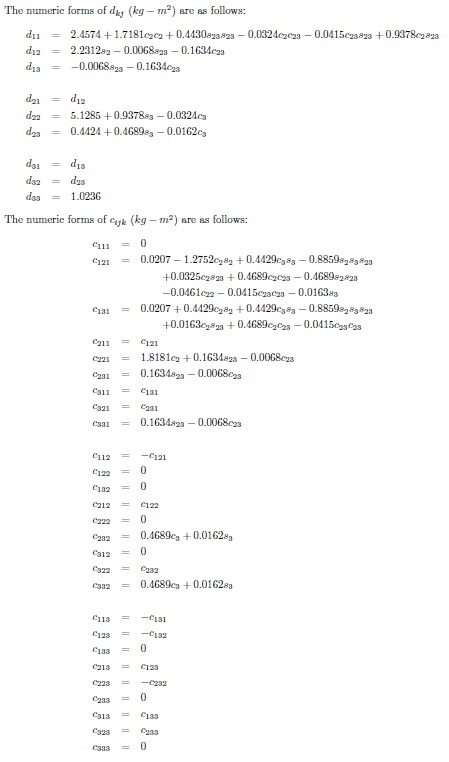
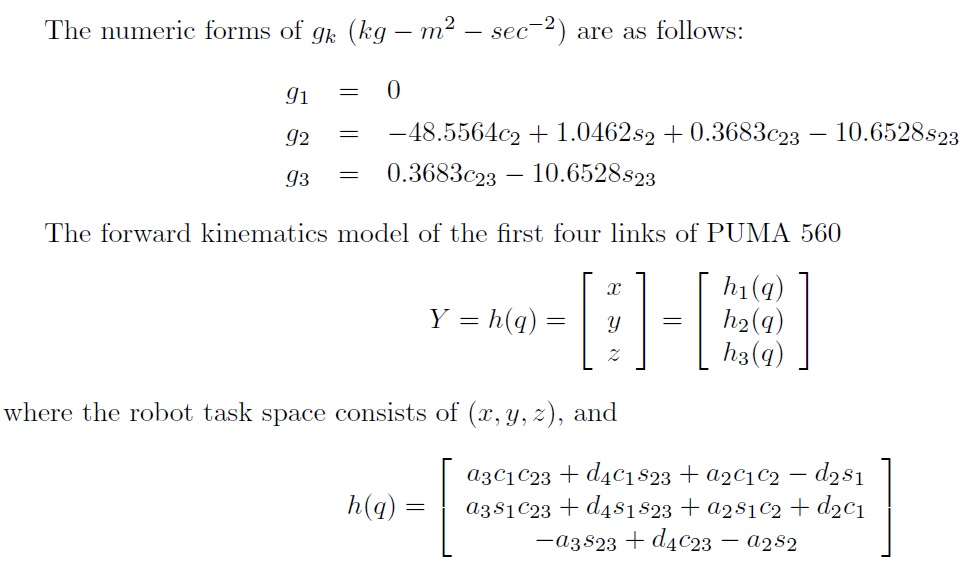
Dynamics Model of the Robot

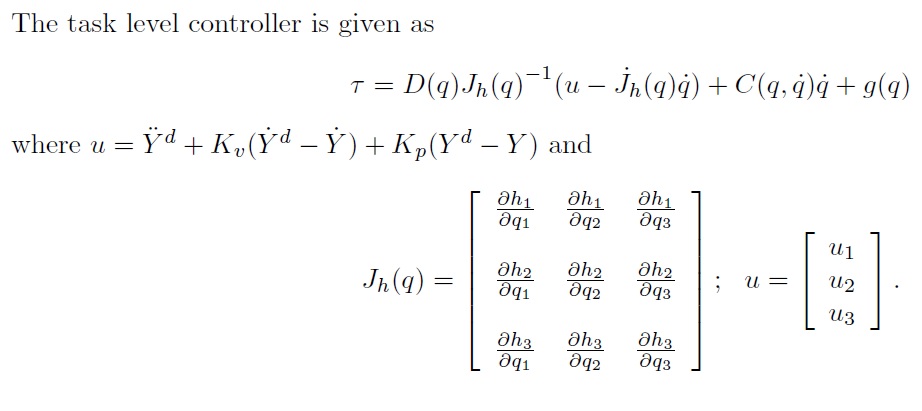
The Task Level Control Method
Required Tasks
Design of the Task level controller
- Derive the nonlinear controller to linearize and decouple the robot dynamics model in the task space
- Write the linearized robot dynamics model in the state space form
The Simulation
-
Develop a software to simulate the robot dynamics model, i.e. numerically solve

-
Numerically implement the non-linear controller
-
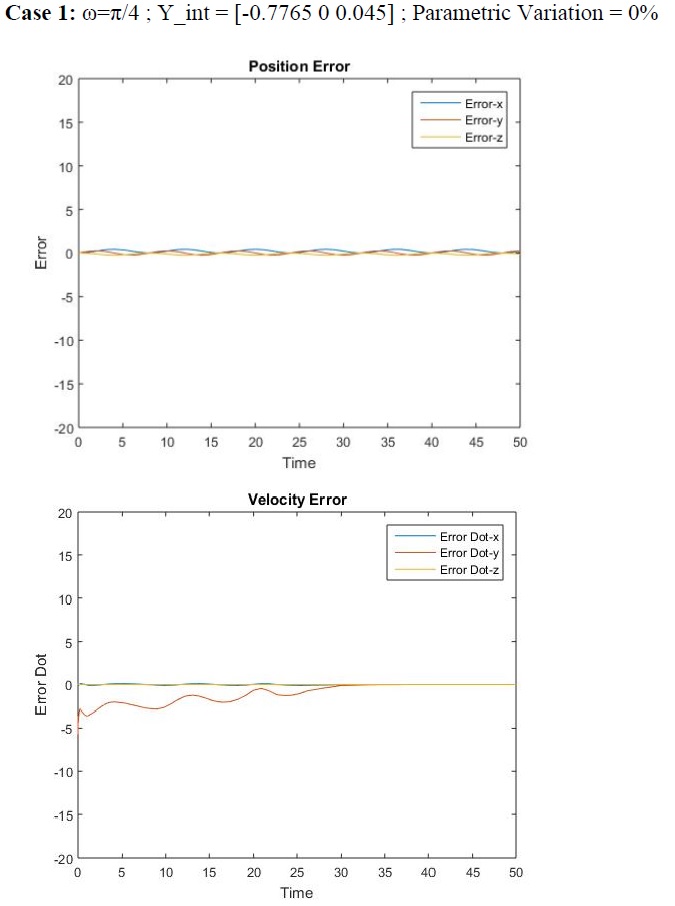
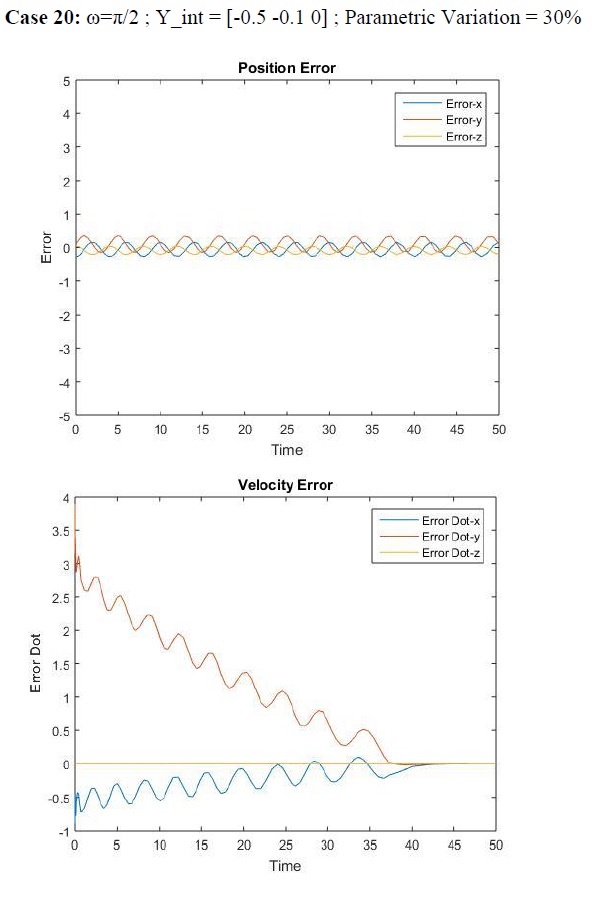
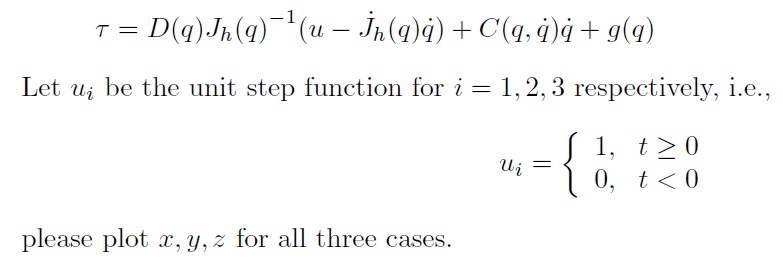
Apply the linear controller in order to track a given desired trajectory as follows

- The parameters in the robot dynamics model dkj ; cijk and gi vary 2%, 5%, 10% or 30% from their nominal values. Please repeat the simulation in 3.
Selected Resuts